A DIY drone (quadcopter)
A DIY drone is a real-time embedded system built around a flight controller like the Pixhawk Flight Controller, which processes sensor data and stabilizes the aircraft. It uses brushless motors, ESCs, and LiPo batteries for propulsion, and is controlled via an RC transmitter such as the FlySky FS-i6 Transmitter. All components work together to maintain stable, responsive flight through continuous feedback and control.
AYBERK BLOG
(quadcopter) is essentially a combination of multiple integrated subsystems: flight control, propulsion, power distribution, and remote communication. Below is a technical overview of how I define and structure a home-built drone system.
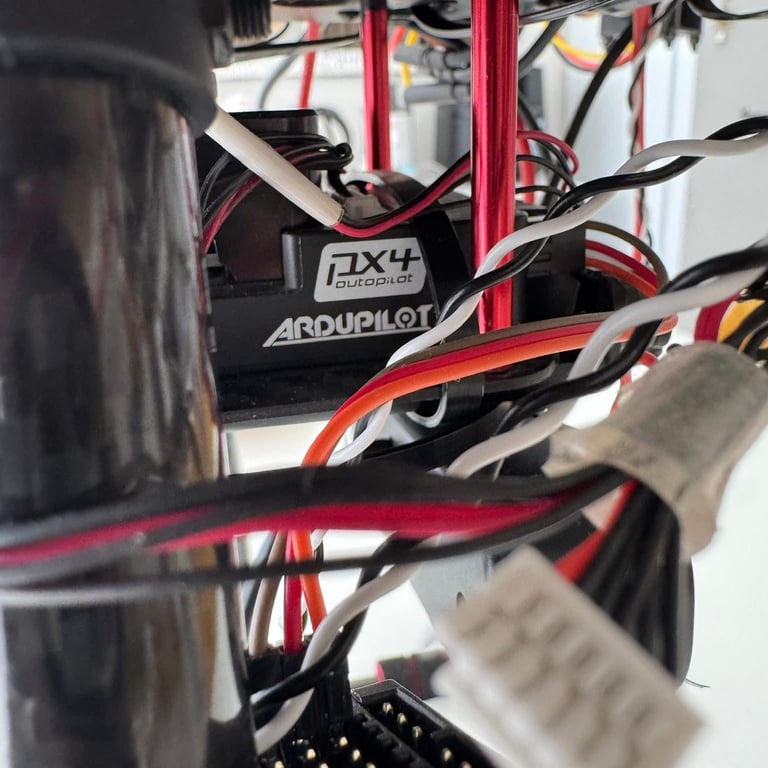
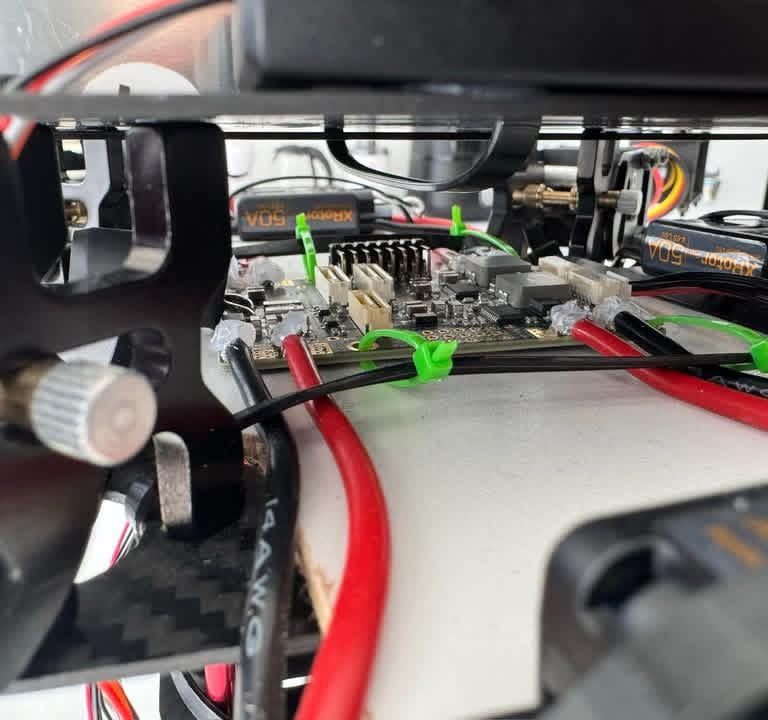
At the core of the system, I use a flight controller such as the Pixhawk Flight Controller or KK2.1.5 Flight Controller. This unit contains an onboard IMU (accelerometer and gyroscope), and in some cases additional sensors like a barometer and magnetometer. The flight controller continuously processes sensor data and executes stabilization algorithms, sending high-frequency control signals to the motors to maintain stable flight.
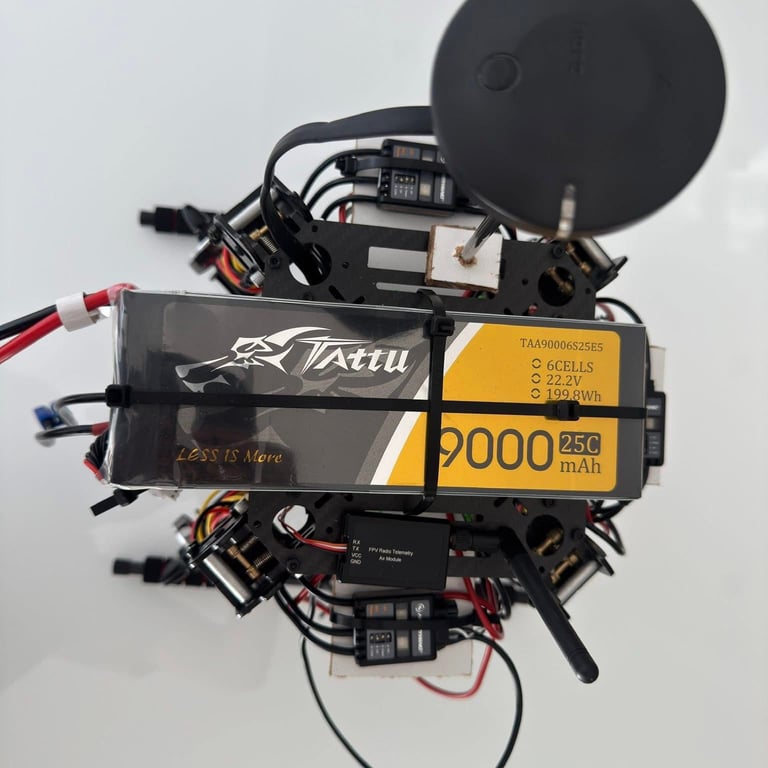
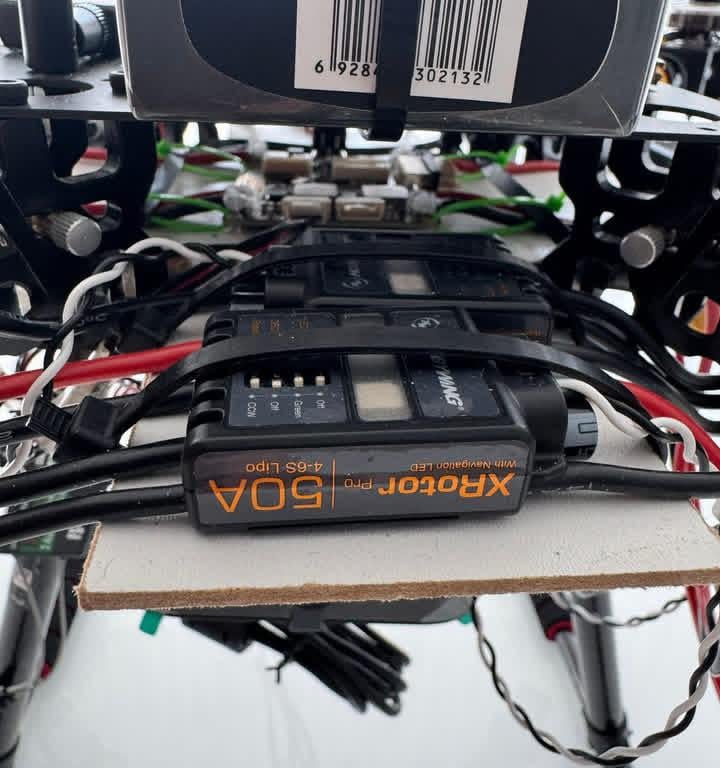
The propulsion system consists of brushless DC motors, electronic speed controllers (ESCs), propellers, and a LiPo battery. Motors are defined by their KV rating, which determines their RPM per volt. ESCs interpret control signals (PWM, OneShot, or DShot) from the flight controller and regulate power delivery to each motor. Propeller size and pitch directly influence thrust and efficiency. For power, I typically use LiPo batteries (e.g., 3S, 4S, or 6S), which provide high discharge rates necessary for stable and responsive flight performance.
The structural frame holds all components together and defines the drone’s geometry. I generally prefer lightweight and rigid materials such as carbon fiber. Most of my builds are quadcopters (4 motors), although hexacopter and octocopter configurations are also possible for redundancy and payload capacity.
For control, I use an RC transmitter such as the FlySky FS-i6 Transmitter paired with a compatible receiver. The transmitter sends user inputs (throttle, yaw, pitch, roll) to the receiver, which then forwards them to the flight controller for processing.
In more advanced configurations, I integrate an FPV system consisting of a camera and a video transmitter, enabling real-time video downlink to goggles or a ground station. If higher autonomy is required, I add a GPS module to enable position hold, waypoint navigation, and return-to-home functionality.
The typical signal flow in my system is:
Transmitter → Receiver → Flight Controller → ESC → Motors
Sensors → Flight Controller → Real-time stabilization corrections